
Tracking y multitracking radar
Tracking and multitracking radar
rev.ciencia.poder.aereo. 8: 81 - 90, 2013
Recibido: 01/08/2013
Aprobado evaluador intemo: 17108/2013
Aprobado evaluador extemo: 24/08/2013
Jimmy Anderson Flórez Zuluaga3
Resumen
Los Sistemas de Defensa Aérea y del Sistema de Control de Mando (C2) son sistemas críticos en el que cada etapa afecta el rendimiento y el error medio del sistema de todos. El Centro de Desarrollo Tecnológico Aeroespacial para la Defensa - CETAD ha estado trabajando para desarrollar técnicas de rastreo para satisfacer las necesidades de la Fuerza Aérea de Colombia, como se explica en este artículo.
Palabras clave: Predicción de trayectorias, procesamiento de señales radar, racking radar.
Abstract
The Air Defense Systems and Command Control System (C2) are critical systems in which each stage affects the performance and the average error of the all system. The Center for the Development of Aerospace Defense Technology - CETAD have been working to develop tracking techniques to suit the needs of the Air Force of Colombia, as discussed in this article.
Key Words: Radar Signal Processing, Trajectory Prediction, Tracking Radar.
_______________________________________
1El artículo de investigación es derivado del proyecto titulado Sistema de Comando y Control Colombiano “HORUS” en su primera etapa, apoyado por el Comando de la FAC, la
Jefatura de Operaciones Aéreas y el Comando Aéreo de Combate N°5, el Centro de Desarrollo Tecnológico Aeroespacial para la Defensa. El Autor desarrolla los algoritmos aquí
descritos para dar solución a los problemas de esta naturaleza.
2This investigative article was derived from the first stage of the project entitled, “Colombian System of Control and Command (HORUS)” given support by the Command of the Air
Forces, the Air Operations Headquarters, the Air Combat Command No. 5, and the Center for the Development of Aerospace Defense Technology.
3Capitán de la Fuerza Aérea Colombiana. Magíster en TIC, Investigador del Centro de Desarrollo Tecnológico aeroespacial para la Defensa (CETAD CACOM 5).
___________________________________________________________________________________________________
1. Introducción
La seguridad de miles de personas que se transportan diariamente a través de aeronaves está en manos de los controladores aéreos, quienes a su vez depositan su confianza en sistemas de control de tráfico (ATCS), los cuales se convierten en los ojos de la seguridad aérea. Los ATCS son sistemas críticos que deben garantizar la seguridad en las operaciones aéreas de todo tipo y en todo momento; actualmente son muchos los tópicos que son estudiados con el fin de mejorar el desempeño de estos sistemas, de disminuir los tiempos de proceso y de aumentar la confiabilidad de estos, todo orientado a maximizar la seguridad aérea y disminuir costos de operación aumentando la eficiencia de las rutas aéreas y manteniendo altos estándares de seguridad. En la bibliografía mundial, dentro de los tópicos más estudiados se encuentran: mejorar la estimación de la detección de los radares primarios, el estudio de filtros para el seguimiento de las aeronaves (Tracking), la gestión predictiva para la infraestructura de los sistemas ATC y la mejora de los sistemas de fusión radar para las operaciones. (Air Traffic Control Association, 2011).
En Colombia la autoridad Aeronáutica la comparten dos entidades, la Unidad Administrativa Especial de la Aeronáutica Civil (UAEAC) y la Fuerza Aérea Colombiana (FAC); la primera orientada a garantizar la seguridad aérea y la operación normal de los aeródromos y la segunda además de apoyar a la primera en su misión, tiene la gran responsabilidad de garantizar que el espacio aéreo colombiano solo sea usado con fines legales garantizando así el control de la soberanía del país.
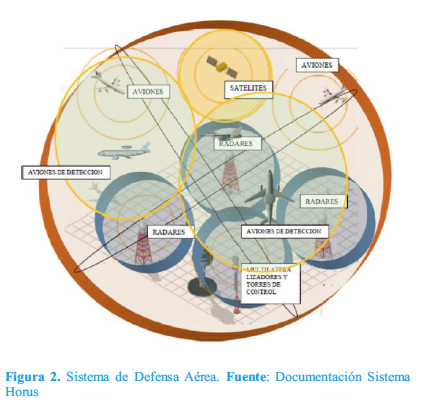
Para ello, utilizan la información provista por sensores RADAR de diferentes tipos, que están distribuidos por todo el territorio Colombiano y permiten mantener una proyección geográficamente referenciada de la posición de cualquier aerodino detectado en tiempo real.
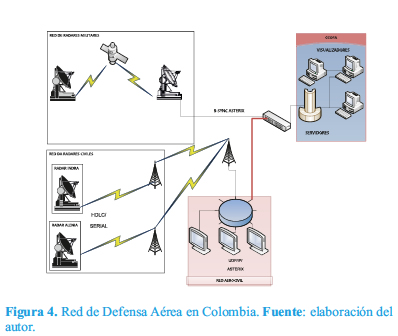
Ambas entidades envían los datos desde cada uno de los sensores, por diferentes medios (Microondas, satelital) hasta los centros de control, donde un sistema integra la información de todos los radares en una plataforma georeferenciada que permite observar la situación aérea. Estos sistemas son altamente complejos puesto que integran la información proveniente de cada uno de los sensores, sin importar la marca, el tipo o el protocolo que manejan, en tiempo real, para lo cual se requiere de una gran cantidad de procesamiento.
Con el fin de fortalecer el sistema de Defensa Aérea Colombiano, la Fuerza Aérea Colombiana a través del Centro de Desarrollo Tecnológico Aeroespacial para la Defensa del CACOM-5, ha desarrollado un sistema propio denominado Sistema Horus, que integra la información radar existente en el país. Este proyecto tiene varios puntos críticos, tales como, la adquisición de los datos, la normalización de la información provista, la normalización de tiempos de operación y de procesamiento, el desarrollo de sistemas de inteligencia artificial para el procesamiento y seguimiento de los datos radar y la presentación gráfica y amigable a los usuarios utilizando estándares internacionales tales como estándares OACI (Organización de la Aviación Civil Internacional) para el caso civil y OTAN (Organización del Atlántico Norte) para el caso militar.
Colombia es un país atípico para los sistemas de tránsito aéreo, ya que existen vuelos ilegales generados por organizaciones narcoterroristas que intentan burlar la detección radar, aprovechándose de las condiciones topográficas. Es por ello, que el sistema de Defensa Aérea Colombiano, debe cumplir con unas condiciones especiales de sensibilidad y procesamiento. En este artículo se presenta la metodología utilizada para solucionar los problemas generados por la necesidad de determinar tráficos o trazas provenientes de un sensor radar de manera automática y la necesidad de integrarlos en una única imagen tridimensional del espacio aéreo. Adicionalmente, se dan pautas para integrar la información que proviene de varios sensores, evitando la generación de multitrayectorias generadas por una misma aeronave que es detectada por varios radares, manteniendo unos estándares adecuados de error promedio de las mediciones realizadas.
Para esto se desarrolla un estudio de cuáles son las causas de esas multi-trayectorias y del procesamiento necesario para poder eliminarlas, se analizan las causas de error teniendo en cuenta que la información procesada proviene de diferentes tipos de sensores y es procesada con errores independientes en cada radar (ya que los sensores tienen diferentes alcances, suelen ser de diferente tipos o marcas y están distribuidos de acuerdo a la densidad del tráfico y la topografía del estado), que existen zonas de intersección de cubrimiento de estos sensores. Normalmente estas zonas de intersección coinciden con una mayor ocupación del espacio aéreo y su finalidad es la de garantizar la seguridad aérea. El solapamiento de la cobertura monoradar, crea una mayor probabilidad de la existencia de detecciones de aerodinos por diferentes sensores en un mismo período de tiempo pero con diferentes tiempos de detección.
2. Marco teórico y estado del arte
Cada país es soberano sobre su espacio aéreo, el cual es considerado según la página de la Fuerza Aérea Colombiana (FAC) como “…la columna de aire por sobre el territorio y el mar territorial de un Estado”. En Colombia, hay dos organizaciones responsables de garantizar su adecuado uso: la Unidad Administrativa Especial de la Aeronáutica Civil (UAEAC), es la organización encargada de velar por la seguridad en las operaciones aéreas y su organización, es decir debe garantizar separaciones aéreas entre las aeronaves que vuelan diariamente en el país y condiciones seguras en el vuelo (Tomlin, 1998), (Nolan, 1998). Por otro lado, la Fuerza Aérea Colombiana debe garantizar el uso legal del espacio aéreo e impedir el uso de éste a organizaciones terroristas o enemigas del estado Colombiano.
Para poder realizar un adecuado control del espacio aéreo, se usan sistemas de vigilancia aérea conformados por redes de sensores, los cuales son utilizados para generar una imagen tridimensional del espacio aéreo. Estas redes deben tener todas las condiciones de los sistemas computacionales críticos (Rushby, 1994).
Los sensores que sirven a este fin son los Radares. Radar son las siglas de Radio Detection and Ranging (detección y medición de distancias mediante ondas radioeléctricas), Un radar opera por radiación de energía electromagnética y detección del eco que retorna producido por la reflexión de la señal en un objeto u objetivo (Skolnik, s.f.). Existen diferentes tipos de radares y diferentes tipos de clasificaciones de acuerdo a su tecnología o uso, entre ellos se destacan: de acuerdo a la tecnología radar de pulso, radar de alta resolución, radar sobre el horizonte, radar de compresión de pulso, radar de onda continua (CW), radar FM-CW, radar de pulso Doppler, radar SAR. De acuerdo a su función: radar de vigilancia, radar Primario y radar Secundario, entre otros; como los expuestos en la conferencia internacional (Neri, 2007). Existen diferentes aplicaciones y estudios en cada uno de estos tipos como por ejemplo la utilización de radares HF para detección de icebergs como se describe en (Khan, 1996) o los nuevos desarrollos en radares de baja probabilidad de detección (Jiménez, 2005).
En el contexto de la vigilancia y control del espacio aéreo se trabaja especialmente con los de tipo primario y secundario. Cuando se habla de radar primario se puede generalizar a cualquier sistema que de manera activa realice detecciones, independiente del blanco; el radar secundario en cambio, es un sistema de detección colaborativo, que requiere que el objetivo tenga un dispositivo que genere una señal que es detectada y decodificada por el receptor mediante un protocolo de comunicación. El radar secundario, por tanto, consta de un transmisor en tierra (interrogador) y un retransmisor que va en la aeronave el cual se denomina transpondedor. Normalmente un radar de vigilancia está conformado por la combinación de un sistema radar primario y uno secundario, independientes entre sí y con diferentes alcances. En los radares de control de tránsito aéreo, a diferencia de los radares militares, los rangos de los primarios son mucho menores que los de los secundarios, debido a los costos de operación; todos estos conceptos son ampliados en manuales y referencias de la UAEAC y de la OACI (1998). El funcionamiento del radar implica la transmisión y la recepción de una misma señal, (usualmente en el mismo punto geográfico), para lo cual se utilizan una o más antenas, a fin de detectar un objetivo a una distancia R, a partir de las características de la señal recibida. Más específicamente, el transmisor envía una señal electromagnética que puede ser descrita como una portadora seno a una frecuencia f, modulada en amplitud o en frecuencia y recibe un eco de la misma de manera que el tiempo que toma la señal, para alcanzar el blanco y regresar al radar, provee información, sobre la distancia y los cambios en la frecuencia de la portadora (efecto Doppler) brinda información sobre la velocidad del objetivo.
Es importante tener en cuenta que el sistema radar, es de naturaleza probabilística. De una manera simplificada se puede definir que una señal recibida por el radar es la suma del eco recibido, más el ruido interno del sistema, más el ruido introducido por el medio; es decir la detección de un blanco, equivale a tomar una decisión sobre si la salida del receptor es debida sólo al ruido o también a la presencia de un objeto. Típicamente para automatizar estas decisiones se utiliza según este autor umbrales estadísticos como “Neyman-Pearson Observer”, o “Likelihood-Ratio Receiver”, entre otros (Skolnik, 2001).
De este modo, es más preciso indicar que realmente lo que se tiene es una probabilidad de detección sin embargo como cualquier sistema de telecomunicaciones, el radar está limitado también por una probabilidad de falsa detección debido a la presencia de ruido proveniente de diversas fuentes (ruido interno o Johnson y ruido externo o clutter). En el estudio de estos sensores hay que contemplarlo como un componente mismo de la señal, debido a que este es inherente al comportamiento tanto de los medios por los que viaja la señal, como a la superficie reflejante (Richard, 2005), los cuales deben ser modelados para mayor exactitud en los cálculos (OACI, 1998b).
Por todos estos motivos, tomar automáticamente decisiones sobre si la detección es válida, es un reto. Los procesos de decisión dan lugar a teorías completas (Kolawole, 2002), las cuales son altamente complejas, más aún en los radares de vigilancia los cuales tienen una cobertura en azimut de 360° con períodos de rotación de antena entre 4 y 12 segundos. La información recibida del procesador radar, cuando existe un eco o punto es correlacionada como un posible blanco o una aeronave. Este tipo de procedimientos de autodeterminación de blancos es importante en la navegación aérea, ya que es una herramienta fundamental para el control de las aeronaves, utilizada por los controladores de tráfico aéreos para garantizar la seguridad de las operaciones aéreas evitando conflictos y accidentes. Por otro lado, procesos con mayor precisión de tracking permiten disminuir el error en los algoritmos de fusión que utilizan los tracks como insumo. Es así que gran parte de las investigaciones que se consultaron, se centran en procesos automáticos que sirven como herramientas en los sistemas de control de tráfico, para que los controladores aéreos puedan evitar cruces peligrosos y accidentes a través de métodos más rápidos y más precisos de procesamientos y predicción de trayectorias (Cobano, Conde, Alejo & Ollero, 2011, May), o en aplicaciones integradas a equipos que garanticen el suministro de información crítica precisa (Evans, 1997; Air Traffic Control Association, 2011), (Matsunaga, Senoguchi, & Koga, 2012).
Este tipo de procedimientos puede observarse en otras áreas de investigación como la estimación de trayectorias de vehículos a través de filtros Kalman (Barrios & Motai, 2011; Khrebtov, Pöttker, Max, & Vossick, 2007).
Se puede encontrar en la literatura, que un track representa la creencia que un objeto físico u “objetivo” está presente y que realmente ha sido detectado por el radar. Es en este punto donde un sistema inteligente podría automáticamente declarar el evento de la posibilidad de la existencia de un track, pero sólo declararlo, cuando la detección del radar es lo suficientemente sostenida, para crear un patrón creíble que indica que el objetivo está actualmente presente (como un opuesto a una sucesión de falsas alarmas) y cuando ha pasado el tiempo suficiente para permitir un cálculo de las características del objetivo, como posición, trayectoria y velocidad. En otras palabras, en un barrido de un radar, aparecen aleatoriamente una cantidad de puntos debido a la suma del clutter y del ruido del sistema.
Por otro lado, aparecen una serie de puntos debido a detecciones reales de objetivos que se encuentran dentro del rango del sensor. Cuando la detección es debida únicamente a radares de tipo primario, el problema es definir cuáles puntos pertenecen a la trayectoria del objetivo y cuáles se dan debido al ruido. Para ello, se debe esperar un lapso de tiempo que permita tener suficiente información para determinar un patrón consistente debido a la trayectoria del blanco, que permita eliminar los puntos debidos al ruido.
Con el fin de poder disminuir el campo de incertidumbre, se utilizan diferentes tipos de procedimientos (Gong & McNally, 2004; Frencl & Do Val, 2012, May; Ching, Yongzhi, Chin & Mital, 1998) que mediante métodos matemáticos pretenden prever la trayectoria del objeto, disminuyendo las probabilidades de incluir en la trayectoria puntos que no sean debidos a esta. Incluso se están trabajando algoritmos que no sólo garantizan cálculos precisos de trayectoria, sino que tienen en cuenta las condiciones del terreno (topografía, vegetación entre otros) y posiciones radar (lugar de ubicación de cada radar con respecto a la posición de la traza) para evitar su detección utilizando algoritmos matemáticos (Pelosi, Kopp & Brown, 2012, Sept).
Para los controladores de tránsito aéreo a cargo de la operación de los aeródromos, mejorar las respuestas de tiempo para el control vectorial de las aeronaves, se convertiría en una herramienta indispensable y valiosa, en el documento (Miquel, Mora-Camino & Loscos, 2006) se describen técnicas de control no lineal basado en la linealización por realimentación aplicados al cálculo de las trayectorias de las aeronaves.
El tracking es crítico en los procesos de fusión de datos, pero es sólo parte del proceso, De la literatura especializada se puede entender que para buscar un buen algoritmo de multitracking o de fusión es necesario disminuir las fuentes de error con el fin de mejorar la precisión de la estimación. Este concepto se aplica en múltiples áreas, como por ejemplo en la estimación de posición de vehículos a través de GPS (Chen, Hsu & Huang, 2012). La idea es buscar la aplicación de métodos estadísticos y de predicción de una manera eficiente para poder ser aplicados en tiempo real (Deng, L., Gao, Y., Mao, Li, L. Y. & Hao, G., 2005, Oct) en donde se aplican filtros Kalman y ARMA (Auto-Regressive Model Average model) al mismo tiempo para disminuir los tiempos de proceso. Otros documentos que muestran la eficiencia del filtro Kalman para diferentes áreas en las que se aborda el problema de la fusión son (Liu & Deng, 2012; Zhang, Qi & Deng, 2012; Wang & Sun, 2012, Ran & Deng, 2012, Jun, Ran et al, 2011, Aug).
2.1. Tracking radar y seguimiento de aeronaves
El principio del funcionamiento de un radar implica la transmisión de una señal y la recepción en el sensor de un eco ocasionado por la reflexión de parte de esta señal, (si existe algún objeto en el que esta señal puede reflejarse). Existiría entonces una recepción de una porción de la misma señal (usualmente en el mismo punto geográfico). Esta señal se analiza y con base en la sensibilidad del radar, cuando la señal recibida supera un umbral, se podría pensar en la existencia de un objetivo; debido al ruido estos sistemas son probabilísticos.

En cada sensor, cuando un blanco está en su rango, se genera una serie de detecciones que para el sistema se convierten en puntos o plots. A través de procesos matemáticos que se abordarán más adelante se busca si existe algún tipo de relación entre esos puntos con el fin de definir una traza o track. A este proceso se le conoce con el nombre de tracking y se realiza en cada radar. Sin embargo, al pensar en un sistema de Defensa Aérea como el mostrado en la Figura 1, en el que se integran varios sensores, estos suelen tener zonas de intersección en las que un blanco es detectado por diferentes fuentes en diferentes instantes de tiempo, creando un número N de trazas debidas a un mismo aerodino, donde N depende del número de sensores que lo detectan.
Cuando estas trazas se superponen, presentan desfases espaciales proporcionales a una serie de factores, como el tiempo de detección, la posición del radar, el período del radar, entre otros, los cuales sumados generan un error propio para cada traza en cada radar. Estas múltiples trayectorias son producidas por un error acumulativo independiente, que se genera en cada etapa del proceso que se realiza en los sistemas de comando y control, para poder desarrollar un algoritmo de integración de Trazas radar asociado a múltiples sensores, que sea exitoso, se analiza el error en cada etapa previa y se proponen alternativas para disminuirlo en cada paso del algoritmo.
A. Análisis del problema.
Como se mencionó, los sistemas de control de tráfico aéreo y de defensa aérea a nivel mundial, integran la información de múltiples sensores, tanto militares como civiles de diferentes tipos con el fin de tener una imagen aérea de cada país en todo momento.
Para poder resolver el problema, es necesario ir más atrás y tratar de resolver problemas anteriores, como el de la detección, la integración de los datos en un sistema multisensor y el tracking mono radar.
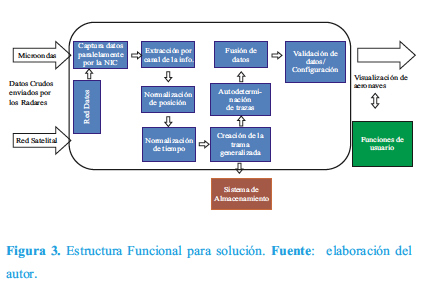
Es decir, se debe analizar el problema como un todo, empezando con la adquisición de datos; por ende se deben incluir los sistemas de normalización espacio-temporales necesarios para tratar la data con el mismo modelo. Esto se muestra en la Figura 3.
Posteriormente, en cada sensor deben minimizarse de manera independiente los errores de detección debidos a la probabilidad de falsa alarma a través de un buen proceso de tracking. Este proceso deberá ser intrínseco a cada sensor, debido a que cada uno de ellos tiene un período propio, una velocidad de envío de datos independiente con codificaciones independientes y además realiza un tratamiento de datos en un procesador propio y diferente para cada radar. Sin embargo, el proceso que se hace para cada sensor aunque es independiente, se ha logrado generalizar siguiendo una serie de pasos iguales para cada radar de acuerdo a sus características intrínsecas, como se muestra en este artículo. Para efectos de comprensión se ha cambiado el orden de los factores del problema pues es natural que la detección de un punto debe realizarse primero que su envío e integración al sistema de Comando y Control, pero se presenta después ya que como proceso computacional en el sistema de Comando y Control, existe primero la adquisición e integración de los datos antes que los procesos matemáticos de tracking que requieren de los conceptos de detección.
A. Adquisición e integración de los datos
B. Detección
C. Tracking Mono-radar
La adquisición de los datos del sistema de Comando y Control Colombiano, se realiza a través de una interface de red. Los datos están organizados por sockets y cada socket a su vez está compuesto por una dirección y un puerto.
Cada sensor envía los datos en protocolos independientes desde diferentes puntos del país. Estos datos son integrados y convertidos a un único formato. Sin embargo, cada sensor mantiene su tiempo de detección y su período de acuerdo al tipo de radar y a su configuración interna.
Existe entonces un error debido a cada sensor y a la independencia tecnológica (debida a que cada sensor es de tecnología diferente con procesos diferentes) de cada uno lo que genera un error que se puede denominar error de conversión, debido a la integración de los sensores. Este error puede ser minimizado realizando alineación de los sensores con aeronaves reales, contrastando la posición marcada en el radar, en el sistema integrado y por el GPS de la aeronave de acuerdo a patrones previamente definidos y utilizando simuladores constantes de trazas para alinear el sensor con la plataforma georeferenciada utilizada.
B. Detección
De acuerdo a Skolnik (2008), el problema de detección de un radar se puede asumir como un problema con distribución binaria donde H denota la no existencia de 0 blancos y H la existencia de alguno, con el fin de maximizar 1 la probabilidad de detección, entonces la ecuación que describiría se existe o no un plot de acuerdo a este texto sería:
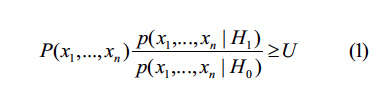
Donde P sería la probabilidad de detección para cada plot xn en cada instante de tiempo para esa detección y U el umbral de detección para cada xn. Como se aprecia la función de probabilidad de detección dependen de la probabilidad de detección contra la probabilidad de falsa alarma en cada muestra independientemente, funciones que a su vez dependen de la potencia del ruido y de la sección recta radar del objetivo.
Suponiendo que se maximiza la función de verosimilitud para que la probabilidad de detección de un blanco sea máxima, si existe un blanco en el espacio generara un plot que será representado como un punto en el espacio bidimensional o tridimensional de acuerdo al tipo de radar, más un error (E(t)) que dependerá de cada detección y será la suma de los errores internos del radar como sistema, en cada instante de tiempo. Este error interno del sistema será la sumatoria de los errores producidos por el subsistema de RF, errores debidos al ruido meteorológico, ambiental y al clutter en general, más los errores debidos a la dirección del blanco, su velocidad y su sección transversal. Para el caso colombiano se utilizará un espacio bidimensional, así que cada plot detectado se podría definir como:

Esta ecuación aplicaría para cada radar, así que si el sistema Colombiano de Defensa Aérea está compuesto por N sensores y en un instante de tiempo determinado, un blanco es detectado por un número q de radares (donde para el caso colombiano siempre N>q), se tendría entonces para un solo aerodino detectando un número q de plots:
Donde la detección de un objetivo, en cada radar se producirá en un tiempo diferente de acuerdo a la posición del aerodino con respecto al radar, las características intrínsecas del radar, el período del sensor y así mismo del error E para cada radar para un solo objetivo. La minimización de este error, requiere de un gran conocimiento del área puesto que los radares traen plantillas de programación que permiten definir escenarios de acuerdo a la meteorología y a la topografía, los cuales deben ser configurados manualmente en la estación de acuerdo a la situación diaria.
C. Tracking
En el proceso de Tracking existen también una serie de errores asociados con el error de detección E de cada sensor, más un error inducido por el proceso de tracking, con lo cual se tiene:

Donde una Traza T producto de un proceso de tracking con número de proceso de traza nt, es debida a la correlación de los puntos (x,y) que cumplan con el filtro determinado, más la suma del error promediado debido a cada plot E, más la suma debido al proceso de tracking K. De la misma manera que para el caso del plot se tendrán q trazas debido a q radares que detectan la misma traza:
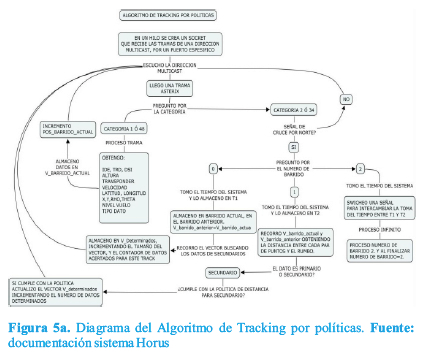
Para el caso del Sistema Colombiano de Comando y Control y con el fin de generar claridad, el algoritmo utilizado, se denominó Filtro de políticas, el cual pretende emular un sistema de lógica difusa parecido al utilizado por un operador de Defensa Aérea, durante el proceso de vigilancia, en el que a través de la observación, se llega a la conclusión de si un grupo de puntos corresponden o no a una traza. A continuación se muestra el proceso de decisión del algoritmo de Políticas, establecido a través de un proceso de investigación, definido por el Centro de Desarrollo Tecnológico Aeroespacial Para la Defensa (CETAD) en 2013. El diagrama de flujo se muestra en la Figura 5a y b.
Estos procesos se realizan en cada sensor con sus datos y su período de manera independiente. El proceso de detección y tracking para cada radar se podría generalizar para cada sensor como una sucesión de pasos como se muestra en la Figura 5a.
Una propuesta para disminuir el error debido a los procesos de tracking en el sistema sería la utilización de un filtro extendido de Kalman, para la predicción del punto siguiente de la trayectoria disminuyendo el espacio probable de análisis.
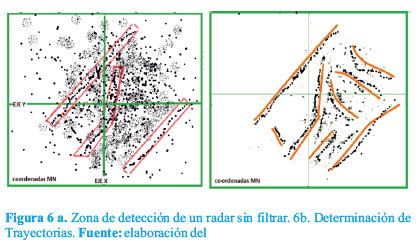
Las siguientes figuras se diseñaron con base en datos reales para ilustrar cómo se debe realizar el proceso de detección automática a través del filtro de Políticas. Las detecciones son realizadas sobre objetivos, pero algunas detecciones se pierden debido a que el objetivo se desvanece, se detectan múltiples objetivos dentro de una misma celda de resolución o simplemente el aerodino realizó un viraje y disminuyó su sección recta radar, lo que se traduce en un desvanecimiento temporal del blanco.
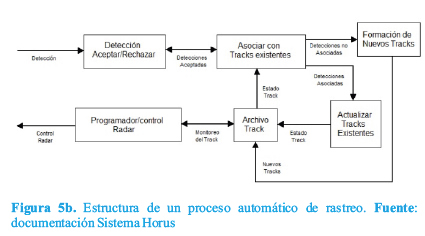
Como se menciona en el algoritmo se realizan básicamente 4 pasos computacionales, así:
a) Detección del eco por el radar.
b) Comparación de la detección aceptada con tracks
existentes.
c) Inclusión de los nuevos plots en los tracks existentes.
d) Definición de nuevos tracks con las detecciones no asociadas
Para el caso del Sistema Colombiano de Comando y Control Desarrollado en CACOM-5, la fusión multi-sensor o multitracking, como tal es un proceso posterior al Tracking de cada sensor y se realiza a través de procesos comparativos y predictivos de cada track y radar.
Inicialmente existe un cubrimiento de un Área A, lo cual es cubierta por varios sensores en diferentes puntos geográficos. En el caso colombiano un Aerodino puede ser cubierto simultáneamente hasta por 5 radares.
Es necesario ante todo definir un período para el sistema y así evitar errores inducidos por los diferentes tiempos de cada sensor, lo que permite establecer una base de tiempos general para todo el sistema. Se hace entonces necesario tener en cuenta que la fusión o el multiracking unifican los datos de múltiples fuentes en cada instante de tiempo t. Se podría entonces, en un momento t estar recibiendo un eco correspondiente a un mismo blanco que está en movimiento en algún radar y como cada sensor está situado en un lugar diferente, la iluminación del blanco por cada radar, consecuentemente será en un t diferente, generando para cada eco de cada radar, un espaciamiento temporal. Es decir, el eco será detectado por todos los sensores, no en un instante sino en un espacio de tiempo t+Δt, lo que a su vez genera una detección del aerodino con un corrimiento espacial entre la detección de uno y otro sensor, proporcional al Δt de cada radar (tomando como instante inicial la primera detección del primer radar). Este corrimiento se suma al error medio atribuido a cada radar, lo que genera un delta de distancia que será atribuido entonces a la suma del error inducido por la detección de aerodino en cada instante t de tiempo y el error inducido por las diferentes ubicaciones geográficas de cada sensor respecto a la posición del blanco y su altitud.
Debido a que el error por el Δt es pequeño, y tanto el error intrínseco del sensor, como el error generado en el proceso de tracking de cada sensor son constantes para cada track; adicional a ello cada sensor está en una posición fija, se definirá como ET el error Total dado por la suma del error propio de las detecciones, el error inducido por el tracking y el error por el cambio del período del sistema.
Se podría decir entonces que todas las trazas detectadas, debidas a un mismo aerodino se encontrarían en una ventana espacial definida por el error total, así:
En esta ecuación S representa el área donde probablemente esté el aerodino y será proporcional a la posición del track tiempo en términos de (x,y,z), debido a cada sensor T nt en cada instante de tiempo.
Posterior a tener la ventana espacial definida se realiza nuevamente la aplicación de una serie de filtros lógicos, orientados a la comparación de las características de la traza. Si las trazas tienen características comunes y están en la misma ventana espacial en un instante de tiempo t, entonces se asumirá que es la misma traza.
3. Resultados
Con todos estos conceptos el CETAD, ha desarrollado un software que integra los algoritmos tratados aquí en un sistema que permite realizar en Tiempo Real los todos procesos descritos.
Para poder llegar al problema del Multiracking, es necesario tratar de minimizar errores en todas las etapas del proceso de los datos, en la detección, la integración y el tracking. Es así que el sistema de Comando y control Colombiano realiza el proceso computacional buscando minimizar el error en cada etapa, para poder resolver el problema de multi-sensor y el tracking mono radar, con un proceso secuencial así:
A. Adquisición e integración de los datos
B. Detección
C. Tracking Mono-radar
D. Fusión o Multiracking
En el presente artículo se muestra un resultado de la operación del sistema en diferentes estadios del proceso y se puede identificar fácilmente la diferencia.
En la Figura 7a. se detalla la señal sin procesar, como es detectada por el radar. Se aprecia una mayor cantidad de ruido, producido por la información de los radares primarios.
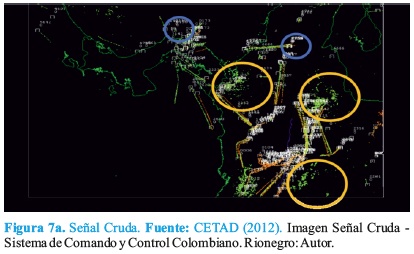
En la Figura 7b, se aprecia la señal con tracking para cada uno de los radares que aparecen. Se observa que el ruido debido a primarios no inicializados. Es decir, que no cumplen las políticas es eliminado o Filtrado.

La aplicación de estos filtros facilita el trabajo del personal de vigilancia y automatiza una gran cantidad de procesos de descarte y filtrado que debían ser realizados anteriormente por el usuario.
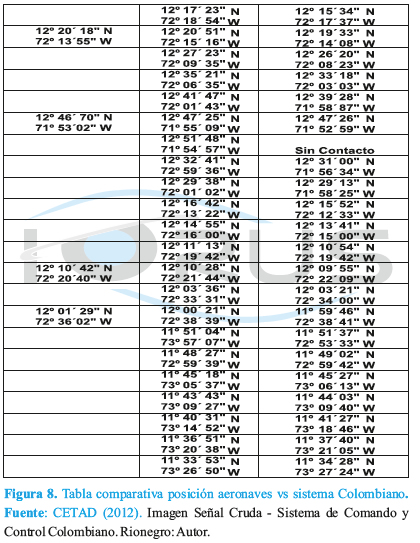
Por último, se probó el desempeño del sistema en un caso real en el cual se verificó la posición de la aeronave GPS y la posición de un sistema de la UAEAC, desarrollado por la empresa INDRA. La tabla de datos se muestra a continuación:
4. Conclusiones
Para poder desarrollar un buen algoritmo de multiracking o de fusión es necesario disminuir todas las fuentes de error que contribuyen a diferenciar las múltiples trayectorias causadas por una misma aeronave, con el fin de mejorar la precisión de la estimación extrapolada.
Los errores debido al proceso de tracking y a las detecciones del radar pueden ser aditivos o sustractivos y dependen de la posición y el cuadrante de cada aeronave, de su rumbo y la distancia al radar, etc. Para el caso evaluado es aceptable un error menor a 1.0 NM.
De acuerdo al estudio realizado, un proceso de fusión exitosa depende de un proceso preciso de tracking evitando errores inducidos por fuentes externas, para lo cual es necesario realizar un ajuste fino de cabeza radar con aeronaves reales.
Con mayor sensibilidad existiría una mayor probabilidad de trazas falsas lo que a la UAEAC no le interesa pero a la FAC sí.
Debido a las fluctuaciones de tiempo que se observa en las muestras la determinación de una ecuación de gasto de tiempo para tracking y multi-tracking, no se puede determinar fácilmente, ya que la relación con el número de muestras que ingresan no es lineal. Un mecanismo propuesto para encontrar una ecuación, consistiría en realizar un gran número de muestras de información de tiempos de ejecución y a partir de estos datos ingresarlos en un proceso de métodos numéricos que permita obtener dicha ecuación. Esta ecuación de tiempo.
Referencias
Air Traffic Control Association (2011). Air Traffic Control Association - 56th Air Traffic Control Association. Annual Conference 2011.
Barrios & Motai. (2011). Improving Estimation of Vehicle´s Trayectory Using the Latest Global positioning System Whit Kalman Filtering. IEEE Transactions on Signal Processing. USA: Univ. of Vermont, Burlington
Centro de Desarrollo Tecnológico Aeroespacial para la Defensa. (2013). Documentación Sistema de Comando y Control Colombiano Horus. 1 ed. Rionegro: autor.
CETAD (2012). Imagen Señal Cruda - Sistema de Comando y Control Colombiano. Rionegro: Autor.
CETAD-FAC. (2009). Imagen Señal Procesada Con Tracking - Sistema de Comando y Control Colombiano. Rionegro: Autor.
Chen, S.H., Hsu. C. W. & Huang, S. C. (2012, Sept). Recursive estimation of vehicle position by using navigation sensor fusion. In 12th International Conference on ITS Telecommunications, ITST 2012, pp. 532–536.
Ching, I. P. W. L., Yongzhi, L. Chin, & D. Mital. (1998) Neurofuzzy techniques for airborne target tracking. In International Conference on Knowledge-Based Intelligent Electronic Systems, Proceedings, KES. Vol. 2, pp. 251–257. NJ, United States: Piscataway.
Cobano, J. A., Conde, R., Alejo, D., & Ollero, A. (2011, May). Path planning based on Genetic Algorithms and the Monte-Carlo method to avoid aerial vehicle collisions under uncertainties. IEEE International Conference on Robotics and Automation, pp. 4429–4434. Seville, Spain: Univ. of Seville.
Deng, Z.L. Y., Gao, L. Mao, Y. Li, & Hao, G., (2005, Oct.) New approach to information fusion steady-state Kalman filtering. Automatica. Vol. 41(10), pp. 1695–1707. Department of Automation, Heilongjiang University, Harbin, People's Republic of China.
El Abed, Dubuisson, & Béréziat. (2012, Apr). Spatio-temporal targetmeasure association using an adaptive geometrical approach. Pattern Recognition Letters. Vol. 33 (6), pp. 765–774. Laboratoire d'Informatique de Paris 6, Université Pierre et Marie Curie, 4 place Jussieu, 75005 Paris, France.
Evans, T. (1997). Airborne situation awareness. In IEE Colloquium (Digest). No. 169, pp. 5/1–5/13.
Frencl, V. B. & Do Val., J. B. R. (2012, May). Tracking with range rate measurements: Turn rate estimation and particle filtering. (2), pp. 0287–0292. EEE Radar Conference
Gong, C. & McNally, D. (2004). A methodology for automated trajectory prediction analysis. In Collection of Technical Papers - AIAA Guidance, Navigation, and Control Conference. Vol. 1, pp. 432–445.NASA Ames
Jiménez Martin, J. L, (2005). Nuevas técnicas de generación de señal para sistemas radar de alata resolución y baja probabilidad de error. Madrid, España: Universidad Politécnica de Madrid.
Khan, R. H. (1996). Target detection and tracking with HF radar using ISAR techniques. In IEEE National Radar Conference – Proceedings., pp. 94–99. NJ, United States: Piscataway.
Khrebtov, P., Pöttker, A., Max S. & Vossick, M. (2007). A wireless location system for sensing the relative position between mining vehicles. In Conference Record - IEEE Instrumentation and Measurement Technology Conference.
Kolawole, M. (2002). Decision Theory. In Radar Systems, Peak Detection and Tracking. Elsevier.
Liu J. & Deng, Z. (2012). Information Fusion Kalman Predictor for Two-Sensor Multichannel ARMA Signal System with Time- Delayed Measurements. Procedia Engineerin. Vol. 29, pp. 623–629.
Matsunaga, K., Senoguchi A., & Koga, T. (2012). Validation test of Downlink Aircraft Parameters via SSR mode S experimental system. In Proceedings International Radar Symposium, pp. 193–198.
Miquel, T. F, Mora-Camino, & Loscos, J.-M (2006). Path stretching and tracking for time-based aircraft spacing at meter fix. In Collection of Technical Papers - AIAA Guidance, Navigation, and Control Conference 2006. Vol. 1, pp. 411–418.
Neri, F. C. (2007). Electronic Defense Systems
Nolan, M. S. (1998). Fundamentals of Air Traffic Control. Third Edit.
OACI - Organización de los Sistemas de Sensores de Vigilancia (1998). Manual Sobre Ensayo de Sistemas del Radar de Vigilancia. Primera Ed: Autor.
_______(1998). Metodología para los ensayos de actuación de los sistemas radar. In Manual Sobre Ensayo de Sistemas del Radar de Vigilancia. Primera Ed.: Autor.
Pelosi, M., Kopp C., & Brown, M. (2012). Range-limited UAV trajectory using terrain masking under radar detection risk. Applied Artificial Intelligenc. Vol. 26 (8), pp. 743–759.
Ran, C. & Deng, Z. (2012, Jun). Self-tuning weighted measurement fusion Kalman filtering algorithm,” Computational Statistics & Data Analysis. Vol. 56 (6), pp. 2112–2128.
_______________. (2011, Aug.) Self-tuning distributed measurement fusion Kalman estimator for the multi-channel ARMA signal. Signal Processing. Vol. 91(8), pp. 2028–204.
Richards, M. A. (2005). 2.3 Clutter. In: Fundamentals of Radar Signal Procesing. Georgia Tech Research Institute.
Rushby, J. (1994). Critical System Properties. Vol. 43(2), pp. 189–219. National Aeronautics and Space Administration Langley. Research Center and the US Naval Research Laboratory.
Skolnik, M. I. (2001). 5.3 Detection Criteria. In Introduction to Radar System. Third Edit. MacGraw-Hill.
____________ (1990) Radar Handbook. Second Ed. McGraw-Hill
____________ (2008). Chapter 7. Automatic Detection Tracking ande sensor integration. In Radar Handbook. Third Edit. New York.
Stakkeland, M. & Brekke, E. F. (2009). Tracking of targets with state dependent measurement errors using recursive BLUE filter, pp. 2052–2061. Univ. Grad. Center, Kjeller, Norway.
Tomlin, C., (1998). Hybrid Control of Air Traffic Management System. Ph.D. Dissertation. U california.
Víctor Baptista, U. E.; Frencil, C.; Val, Joao Bosco Ribeiro Do.; & R. S. M. E. (2012, Apr). Filtragem Utilizando Imm-Ekf-Blue Em Modelos De Giro Constante Con Taxa De Giro Desconhecida. Universidad Estadual de Campinas
Wang X. & Sun, S.L. (2012). Measurement feedback self-tuning weighted measurement fusion Kalman filter for systems with correlated noises. Journal of Applied Mathematics.
Zhang, P. W., Qi, & Deng, Z. (2012). Multi-channel ARMA Signal Covariance Intersection Fusion Kalman Predictor. Procedia Engineering. Vol. 29, pp. 609–615. International Workshop on Information and Electronics Engineering: Elsevier